





Çevre Güvenliği Uygulamaları için En İyi Uygulamalar Kılavuzu
Nereden Başlamalı
Bir çevre koruma uygulaması tasarlamanın temel konsepti, dış alanları iç alanlardan ayıran sanal bir hat oluşturmayı içerir. Çoğu durumda, bir hedefin harici bir alandan dahili bir alana geçerek sanal hattı geçtiği an izinsiz giriş olarak kabul edilir. Ancak bazı durumlarda, sanal hatta giren veya önceden tanımlanmış bir dahili alan içinde hareket eden hedeflerin tespit edilmesi de gereklidir.
Kamera yerleşimi ve yüksekliği, lensler ve mesafeler gibi tasarım parametrelerini belirlemek için aşağıdaki şartların karşılandığından emin olmak için çeşitli hesaplamalar yapılması gerekir:
- Potansiyel bir hedefin güvenlik kamerasının görüş alanı tarafından tamamen kapsanmadığı tüm "ölü bölgeleri" ortadan kaldırmak için sanal hat boyunca yeterli kapsama alanı olmalıdır.
- Hedef boyut doğrulaması, belirli bir kameranın video analizinin gerektirdiği performans kriterlerini, çit hattı boyunca kameraların her birinin kapsadığı en yakın noktalardan en uzak noktalara kadar karşılamalıdır.

Hedef boyut ve kapsam arasında çeşitli değiş tokuşlar uygulanır. Genel olarak, kameranın kapsama alanını genişletmek, görüş alanında daha küçük hedefler oluşmasına neden olur. Bu nedenle, başlamanın en iyi yolu başvuru gereksinimleridir:
• Uygulama, algılama veya tanıma gerektiriyor mu? İnsanlar ve araçlar arasında ayrım yapmak zorunda mı?
• Önemli alarm senaryoları nelerdir? Bir hedef sanal hattı geçtiğinde veya ona yaklaştığında bir uyarı tetiklenmeli mi?
• Performansı maliyetlere tercih ediyor muyum? Daha fazla kamera kullanıldığında algılama olasılığı artar ve örtüşen kapsama alanına izin verir. Öte yandan, çoğu zaman daha az kamera kullanmak ve yine de yüksek performansı garanti etmek mümkündür.
Kamera yerleşimi
Kamera yerleşimini belirlerken, optimum alan kapsamı ve çit hattı koruması elde etmenin birkaç yolu vardır. En iyi uygulamalar, belirli çevre düzenini, uygulama gereksinimlerini ve site topolojisini dikkate alır. Bununla birlikte, çoğu durumda optimum performans ve verimlilik, kameraların görüş alanları çit hattına paralel ve çevreye yaklaşan veya sınırdan geçen potansiyel davetsiz misafirlerin hareketine dik olacak şekilde yerleştirilerek elde edilir.
Kameranın görüş alanı içinde, hedefler kamera görüntüsünün bir tarafından diğerine yatay olarak hareket ettiğinde en yüksek algılama olasılığı ve en düşük yanlış alarm oranı elde edilir. Aşağıdakiler, çevre boyunca tam kamera kapsama alanı sağlamak için kamera konumlandırması için en iyi uygulamalar olarak kabul edilir.
• Kamerayı 4 metre (13 ft) veya daha yüksek bir yüksekliğe kurun
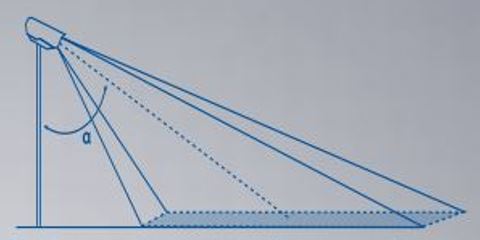
• Kamerayı 45-60 derece aralığında bir eğim açısı ile yere doğru yönlendirin (eğim açısı, kamera direği ile kameranın görüş alanının merkezi arasında ölçülen açı olarak tanımlanır)


• Birden fazla kamera içeren kurulumlarda, kameranın hedefi "tepeden tırnağa" göremediği tüm ölü bölgeleri ortadan kaldırmak için kameraların görüş alanları örtüşmelidir.
• Optimum performans için, kameraları yaklaşan hedeflere bakacak şekilde yönlendirmek yerine görüş alanları tel örgü hattına paralel ve davetsiz misafirlerin hareketine dik olacak şekilde konumlandırın.
• Kameraları, görüş alanları ufuk çizgisini mümkün olduğunca az görecek şekilde konumlandırın. Kamera konumunu belirlerken, yalnızca izinsiz giriş anını mı yoksa bir hedefin bir alana yaklaştığını mı algılamanız gerektiğini düşünün.
• Kameraların minimum titreşim ve rüzgara karşı maksimum direnç ile sabit direklere monte edildiğinden emin olun.
Doğru lensi seçmek
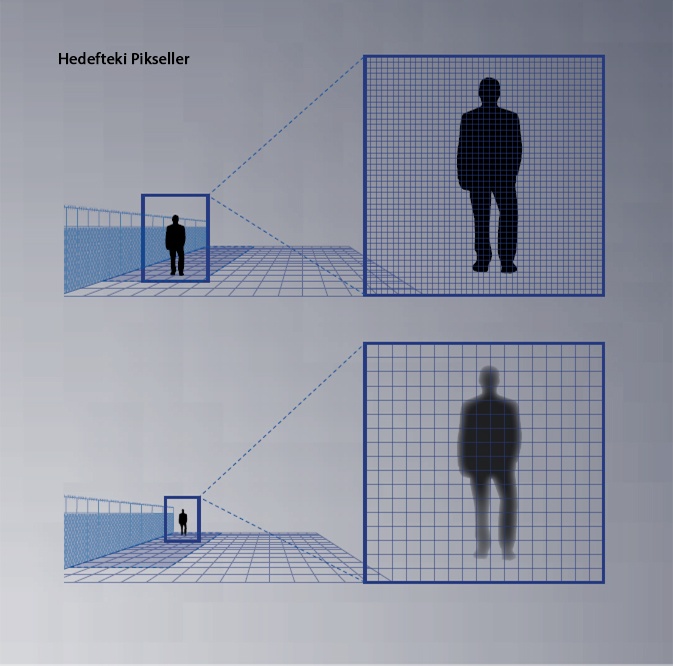
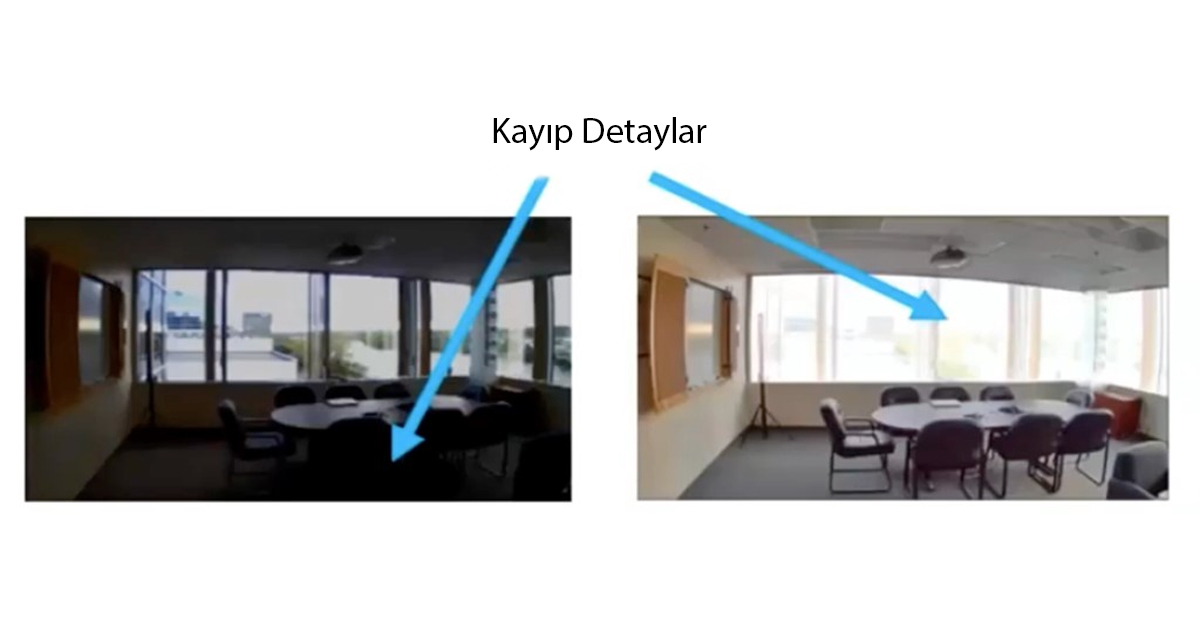
Bir lens seçerken göz önünde bulundurulması gereken ana husus, hem kameranın görüş alanı hem de hedef boyutu üzerinde önemli bir etkiye sahip olan odak uzaklığıdır. Daha büyük odak uzaklığı, daha fazla sayıda pikselle temsil edilecek şekilde görüş alanındaki nesnelerin büyütme oranını artırır. Başka bir deyişle, daha büyük odak uzaklığı, video analitiği için daha büyük hedefler anlamına gelir ve bu da daha büyük algılama mesafesi sağlar. Şekil 5'e bakın.

Öte yandan, odak uzaklığı ve görüş alanı arasındaki korelasyon tam tersidir: odak uzaklığı ne kadar küçükse, görüş alanı o kadar geniştir. Şekil 6'ya bakın. Bu, uygun lensi seçerken, algılama mesafeleri ile sahnenin genişliği arasındaki ödünleşimin dikkate alınması gerektiği anlamına gelir. Çoğu durumda, en iyi uygulama, sahne genişliği için minimum gereksinimi tanımlamak ve genişlik kriterlerini karşılamak için mevcut en büyük odak uzaklığını seçmektir.

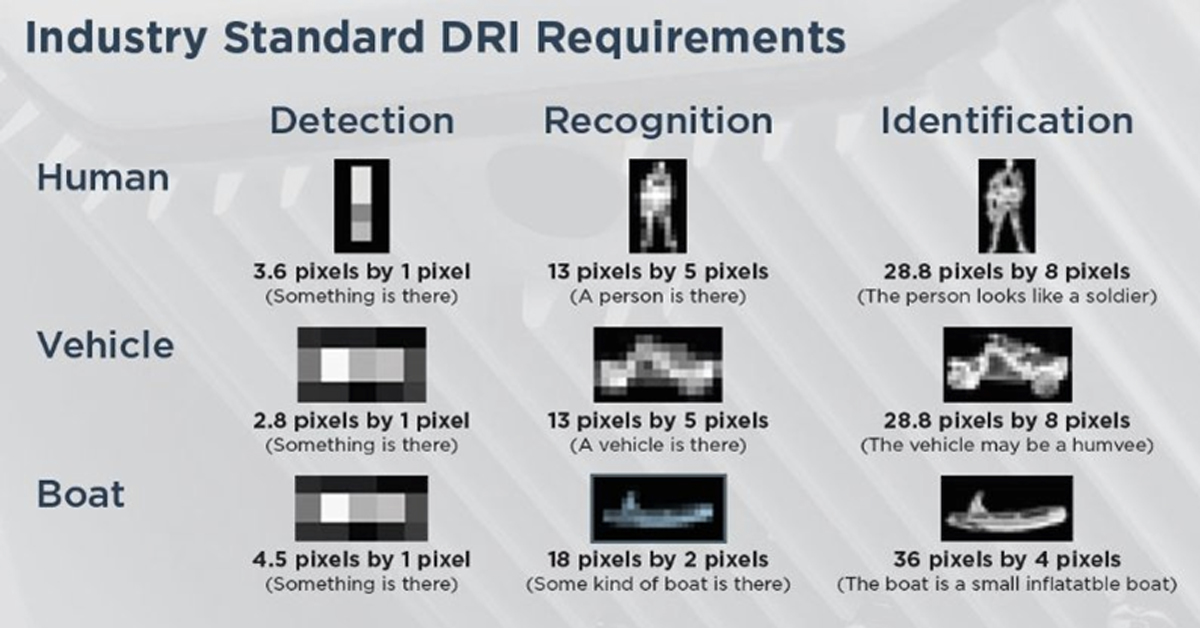
Hedef boyutu ve algılama aralığı
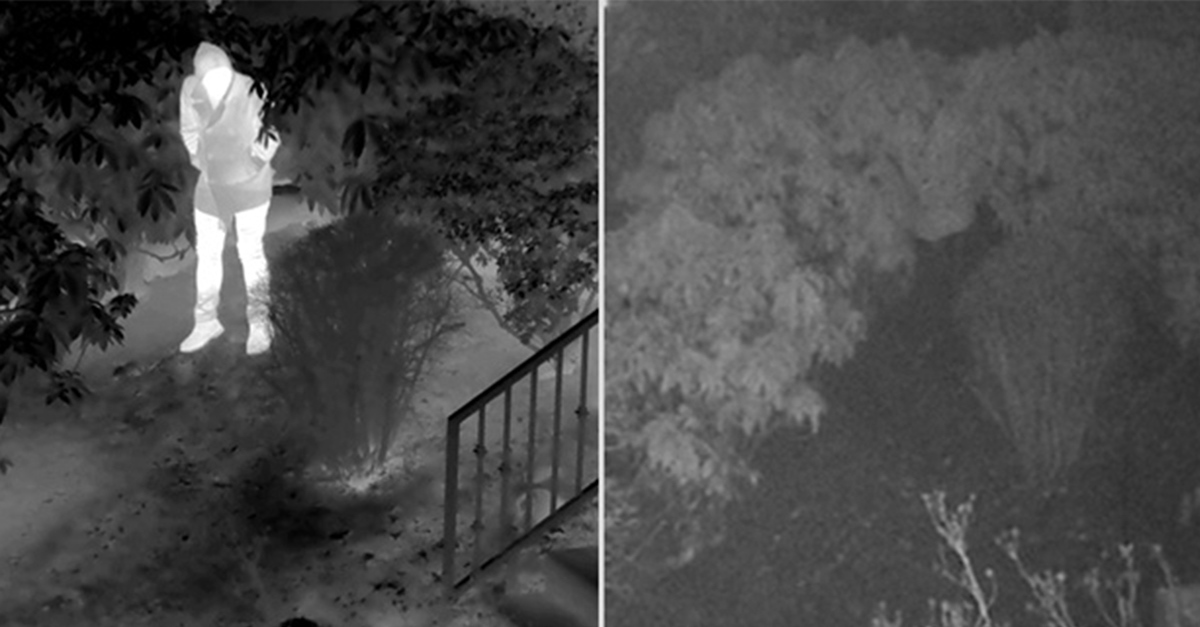
Hedef boyutu, yerleşik analitiğe sahip bir FLIR kameranın bir hedefi algılayabileceği maksimum mesafeyi hesaplamak için kullanılan bir terimdir. Bu mesafe aynı zamanda “algılama aralığı" olarak da adlandırılır.”
Hedef boyutu, kamera görüntüsündeki hedefi temsil eden piksel sayısına göre belirlenir ve “Hedefteki Pikseller” (POT) olarak da bilinir. Kritik faktör olan hedef boyutun yanı sıra, algılama aralığı kriterleri, arka plan sıcaklığı (sıcak çöl ve soğuk kar) ve atmosferik koşullar (açık gökyüzü ve sis) dahil olmak üzere çok sayıda çevresel ve sistem değişkenine de bağlıdır. Her ikisi de sahnenin kontrast seviyesini, hedefin görünürlüğünü, hedefin doğasını anlama yeteneğini (hareketli araç vs. sürünen insan), hızını ve hareketini doğrudan etkiler.
Bu nedenle, algılama aralıklarının belirlenmesi, bu ek faktörleri dikkate alan istatistiksel bir değerlendirme olarak ele alınmalıdır. En iyi uygulama olarak, ilgili faktörlerin dahili video analitiğinin algılama aralığının performansını olumsuz etkilemediği optimum koşullar altında algılama aralığını hesaplamak için aşağıdaki formül sağlanmıştır. Başka bir deyişle, optimal koşullar altında algılama, pratik senaryolarda ulaşılabilecek maksimum mesafeyi yansıtır.
Tespite ek olarak, formül optimum koşullar altında sınıflandırma aralıklarını hesaplamak için kullanılabilir. Algılama ve sınıflandırma arasındaki fark, algılama insan veya araç hedefleri tarafından tetiklenen alarmlarla sonuçlanırken, sınıflandırmanın ikisi arasında ayrım yapmasına ve sistemi belirli hedef türleri için bir alarm üretecek şekilde diğerlerini görmezden gelirken yapılandırmasına izin vermesidir.
FLIR, herhangi bir FLIR termal kamera modeli için herhangi bir mesafede hedef boyutu / POT'u hesaplamanın uygun bir yolu olan Raven adlı çevrimiçi, kullanımı kolay bir ürün planlama aracı sunar. Algılama veya sınıflandırma ölçütlerinin karşılandığı maksimum mesafeye göre algılama veya sınıflandırma aralığını belirleyin.


Mevcut uydu görüntülerini kullanan Raven Site Planning Tool, kullanıcıların FLIR kameralarının son derece hassas, koordinat kontrollü konumlara yerleştirilmesini simüle etmelerini sağlar.
Aşağıdaki tablo, FC-Serisi ID kamera hattı algılama ve sınıflandırma mesafeleri için hızlı bir referans olarak kullanılabilir.
Sınıflandırma Aralığı

Algılama Aralığı

Blog Yazıları

Termal Kamera Seçimi
Ne Kadar Uzağı Görebilirim?
İnsan Sıcaklığı Nasıl Ölçülmeli?
Wide Dynamic Range Nedir?
MyNoIse Ses Karıştırıcı İncelemesi

Kablosuz Dağıtım Sistemi Nedir?
Poe Vs. Poe+ VS. Poe++: Endüstriyel Ethernet Anahtarı Nasıl Doğru Seçilir?

Endüstri Lideri Endüstriyel Ethernet Anahtarları
Endüstriyel Nesnelerin İnternetinin Ne Olduğunu Anlamak

Hub, Switch Ve Yönlendirici Arasındaki Fark
Termal Görüntüleme Kameralarının 5 Faydası

Endüstriyel Ethernet Ve Normal Ethernet Arasındaki Fark

Otonom Araçlar İçin Kullanılan Endüstriyal Ağ Ekipmanları

Siber Güvenlik: Endüstriyel Kontrol Sistemlerini Koruma

Endüstriyel Ağlar Dronlar'a Karşı Nasıl Güvenlik Sağlayabilir ?
.webp)
Termal Kameralar Evinizi Nasıl Serin Tutacağınızı Açıklıyor

Flir One Pro
.png)
Soğutmalı Termal Görüntüleme ile Eşsiz Denizcilik Bilinci
.png)
Sizin İçin Doğru El Tipi Termal Kamera Nedir?
.png)
Kamera Çözünürlüğü ve Menzil
.png)
Deniz Kameraları için Özel Uygulamalar
.png)
Termal Görüntüleme ile Gece Görüşü Arasındaki Fark Nedir?
.png)
Termal Görüntüleme Sis ve Yağmur İçini Görebilir mi?

Hangi Cx-Serisi Kamera Size Uygun?
.png)
MSX® nedir?

Denizcilikte İlk Müdahale Ekibinin Termal Görüntüleme Gerektirmesinin Beş Nedeni
.png)
Üstün Termal Kameraların 3 Ayırt Edici Özelliği
.png)
Görünür ve Termal Güvenlik Kameralardan Hangisine İhtiyacınız Var Belirleyin

Bullet - PTZ - Dome: Hangi Güvenlik Kamerası Size Uygun?
Makine Görüşü için Arayüzler
Yapay Görme Sensörü İncelemesi
.png)
Sektör Lideri Teledyne FLIR, 20 mK Dan Daha Az Hassasiyete Sahip, Uzun Dalga Kızılötesi Termal Kamera Modülü Boson +'ı Piyasaya Sürüyor
.png)
Teknik İnceleme: IP Tabanlı Güvenlik Yakınsaması
.png)
Güvenli Şehirleri Akıllı Şehirlere Dönüştüren 3 Teknoloji
.png)
Sahadan İçgörüler: Giriş Kontrolü İçin Termal Kamera Taraması Kullanarak İş Yeri Güvenliğinin Sağlanması

Kuvvet Çarpanı Olarak Termal Gece Görüşü

Termal Görüntüleme Duvarların Arkasını Görebilir mi? Ve Diğer Sık Sorulan Sorular
Uygulama Özeti: Hızlı Isı Üretimi için Erken Yangın Tespiti

Erken Yangın İşaretlerini Tespit Ederek Personeli ve Ekipmanı Koruyun

Teledyne FLIR, Yangın Algılama ve Durum İzleme için A500f/A700f Kameralarını Piyasaya Sürüyor

Termal Görüntüleme Kameraları, Tünellerde Yangın Güvenliğini Garanti Etmeye Yardımcı Olur

Termal Görüntüleme Kameraları Yangınları Önlemeye Yardımcı Olur
ITS Serisi Dual AID, Japonya'daki Yangın Algılama Sistemleri Standartlarını Aşıyor

PTZ Kamera ve Radarları Tabakalama Yöntemi ile Kullanmak Çevre Korumasını Nasıl Geliştirir?
Uzaktan Güçle Sıfırlama Teknolojisi

Yat Sahipleri Neden Lityum Iyon Pil Yangin Riskini Azaltmak Için Termal Kameralari Tercih Ediyor?
.png)
Akıllı Taşımacılık Sistemleri
Çevre Güvenliği Uygulamaları için En İyi Uygulamalar Kılavuzu

Termal Akıllı Sensörlerle Yayaları, Bisikletlileri ve Daha Fazlasını Koruyun

Teknik İnceleme: Çevre Sistemlerine Yer Tabanlı Güvenlik Radarının Uygulanması

Termal Kaçak Nedir?

Gelişmiş Termografi Kullanarak Akü Muayenesi

Lityum Pil Depolama için Yangından Korunma Sağlanması

Termal Görüntülemenin Gücü
.png)
Panel PC'ler Neden Endüstriyel Uygulamalar İçin Mükemmeldir?

Teledyne DALSA
.png)
Sanallaştırılmış Bariyer Video Analitiği'nin Çevre Güvenlik Sistemleri İçin Avantajları
.png)
FLIR M364C ile Suda
.png)
NASA, FLIR Boson Termal Kamerayı Uzaya Taşıyor
.png)
Liman Güvenliğini Artırma: DP World Yarımca’nın Etkin ve Güvenli Liman Operasyonlarında FLIR Güvenlik Çözümlerine Güveni
.png)
Tespit Doğruluğu için Termal Hassasiyetin (NETD) Önemi
.png)
Bosphorus Boat Show 2025: Denizcilik Dünyasının Buluşma Noktası

Uygulama İncelemesi: Kritik Varlıkların Termal Koşullar Altında İzlenmesi
.png)
Deniz Yangınlarıyla Mücadelede Termal Görüntüleme

Mobil Haritalamada Görüntüleme
.png)
Petrol Sızıntısı Tespiti için Termal Görüntüleme

Denizde Hayat Kurtaran Teknoloji: Termal Görüntülemenin 5 Avantajı

Vaka Analizi: Otomotiv Üretiminde Akustik Görüntüleme ile Verimlilik

Karanlıkta Güvenliğin Anahtarı: Termal Görüş Teknolojisi
.png)
Çizgi Tarama Temas Görüntü Sensörü - AxCIS

Çözünürlüğün Ötesinde: Mobil Haritalamada Kamera Sistemlerinin Gerçekten İşe Yaramasını Sağlayan Unsurlar
.png)
USV Uygulamaları için Çok Spektral Deniz Kameraları: Gelişmiş Görüntüleme Çözümleri
.png)
Dalgalı Denizlerde Bile Net Görüş: FLIR Marine ile Üstün Görüntü Sabitleme
 (1).png)
Güvenli Seyir İçin Akıllı Çözüm: FLIR Marine Video Takibi ve Radar Entegrasyonu

Doğru Makine Görüntüleme Sistemi Nasıl Seçilir?
How to select the right machine vision system
Whitepaper: Applying Ground-Based Security Radar to Perimeter Systems
Beyaz Bülten: Çevre Güvenlik Sistemlerinde Yer Tabanlı Radar Uygulaması
Top Perimeter Security Trends for Critical Infrastructure
Kritik Altyapı için En İyi Çevre Güvenliği Eğilimleri

FLIR, Londra'daki New Covent Garden Market'in IP güvenlik sistemine geçişine yardımcı oluyor
The Tangible Advantages of Flir Nexus
Flir Nexus’un Somut Avantajları
Teledyne Healthcare, RSNA 2024’te ileri görüntüleme yeniliklerini sergileyecek